

E aí gente beleza, meu nome é pedro, tô me arriscando a desenvolver um projeto usando esp32, é meu primeiro projeto. Eu venho em busca de dicas e soluções pelos olhos de vocês.
O objetivo é melhorar o conforto e facilitar colocar o dog nela, no meu caso, a Nina
Ao deitar ela sempre ficava com a bunda levantada pra cima, muito desconfortavel pra ela
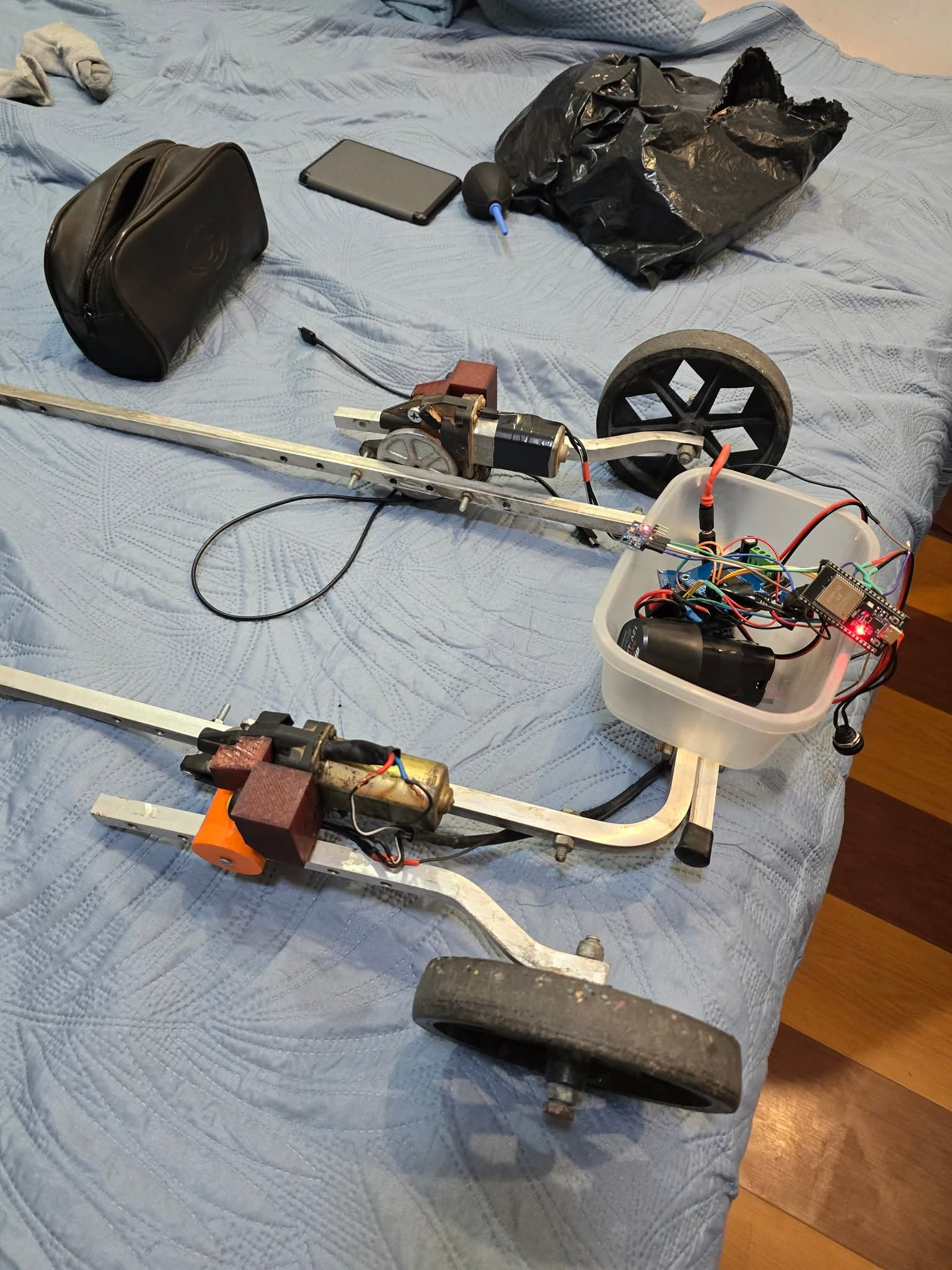
A ideia do projeto é um mpu6050 detectar o angulo quando ela esta deitada e abaixar as rodas, nivelando ela
Já desenvolvi um código e esta parcialmente funcionando, mas nao testei nela ainda pois:
1- O motor que estou usando ( vidro eletrico de carro) nao aguenta o peso, pois o peso esta a 27cm do eixo.
2- Preciso modelar e imprimir para deixar tudo compacto e bonitinho.
3- O Mpu nao sabe se é o terreno ou ela que deitou, pois no morro ele acha que deitou e abaixa, pois o angulo muda.
O principal seria achar uma solução para a força do motor, eu pensei em:
Modelar uma reducao planetaria e usar a propria engrenagem do eixo do motor atual como sun, o que daria mais ou menos 3:1 de redução no espaço que tem
Colocar um kit de redução com correia ou engrenagens
Substituir o motor por um de limpador de parabrisa, que é bem maior e ficaria meio atrapalhado
Substuir o motor por um reduzido com worm do aliexpress com 100kg.cm de força o que daria pra levantar 3kg na ponta da alavanca de 27cm, e ainda acho que seria o limite, o ideal seria mais forte, mas esse já custa 140 reais.
Preciso de ajuda para pensar em mais soluções para isso e para o carrinho em si, valeu galera agradeço qualquer ajuda!